
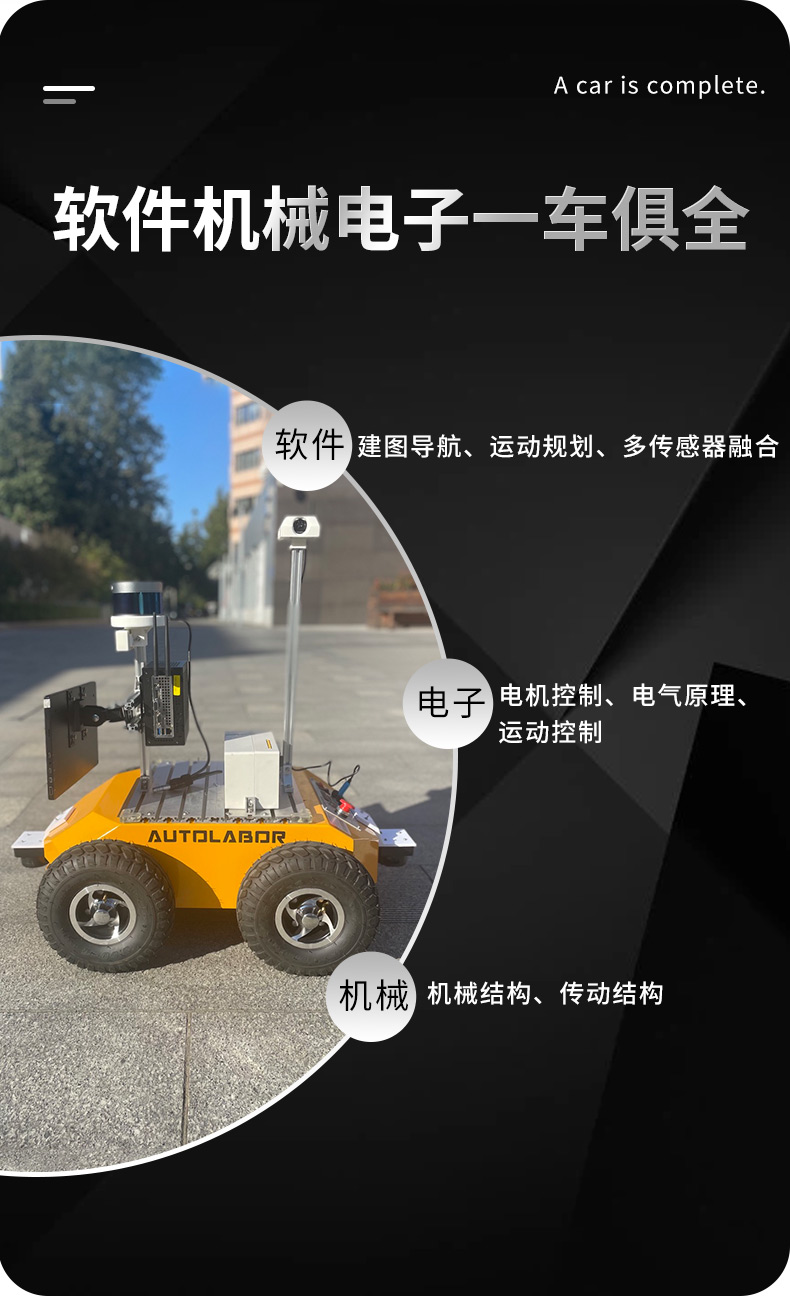
Autolabor Pro 1是由Autolabor无人车团队研发的一款用于科研的开源机器人平台,广泛用于高校教学、实验室研究、产品原型机等。
Autolabor Pro 1搭配全套传感器及导航软件,丰富的教程及资料,代码全部开源、极大降低了用户的使用门槛,用户可快速上手学习或二次开发。软件持续免费更新,也为用户提供更好的使用体验。
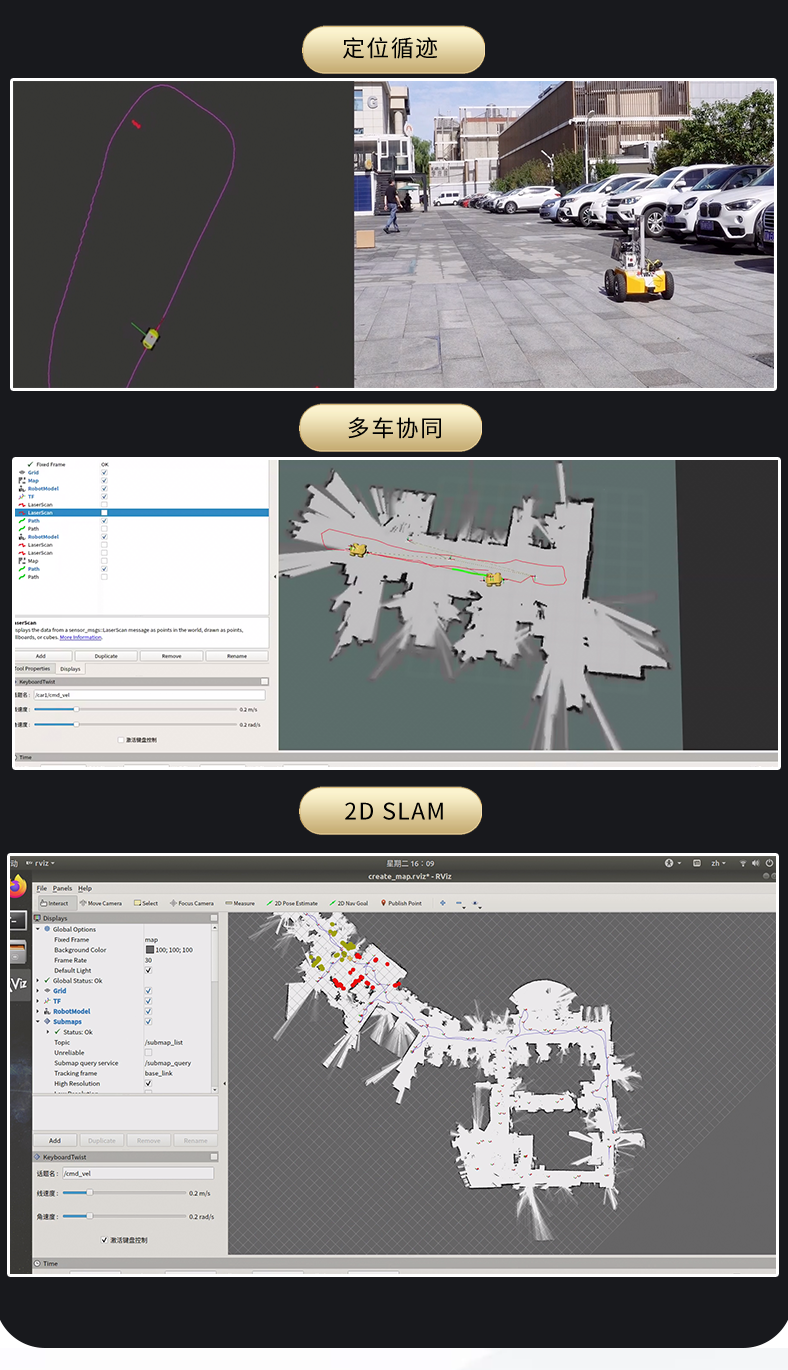
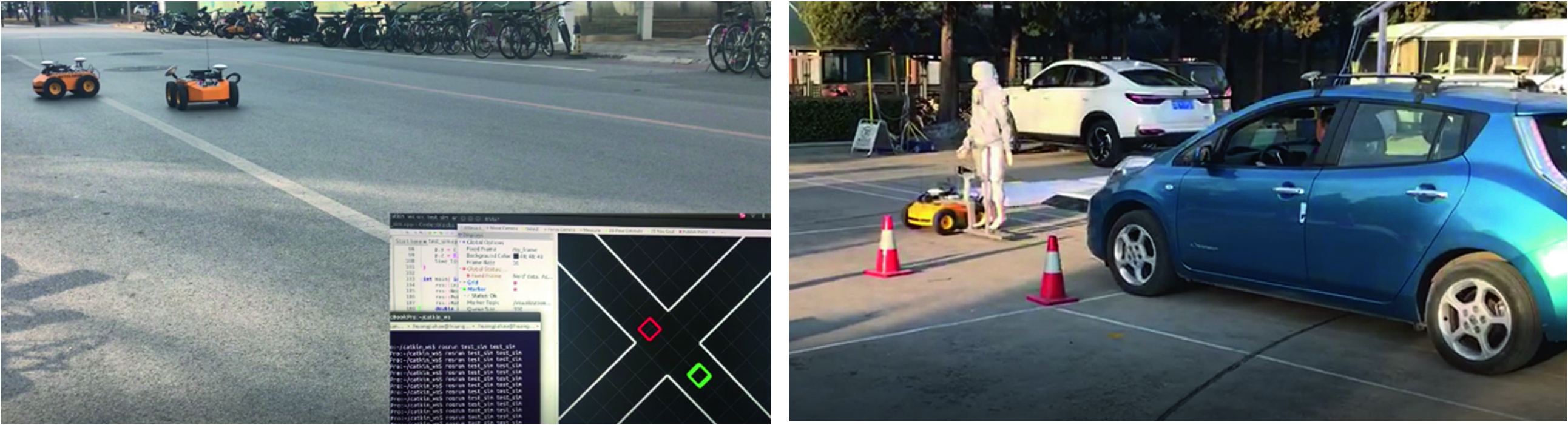
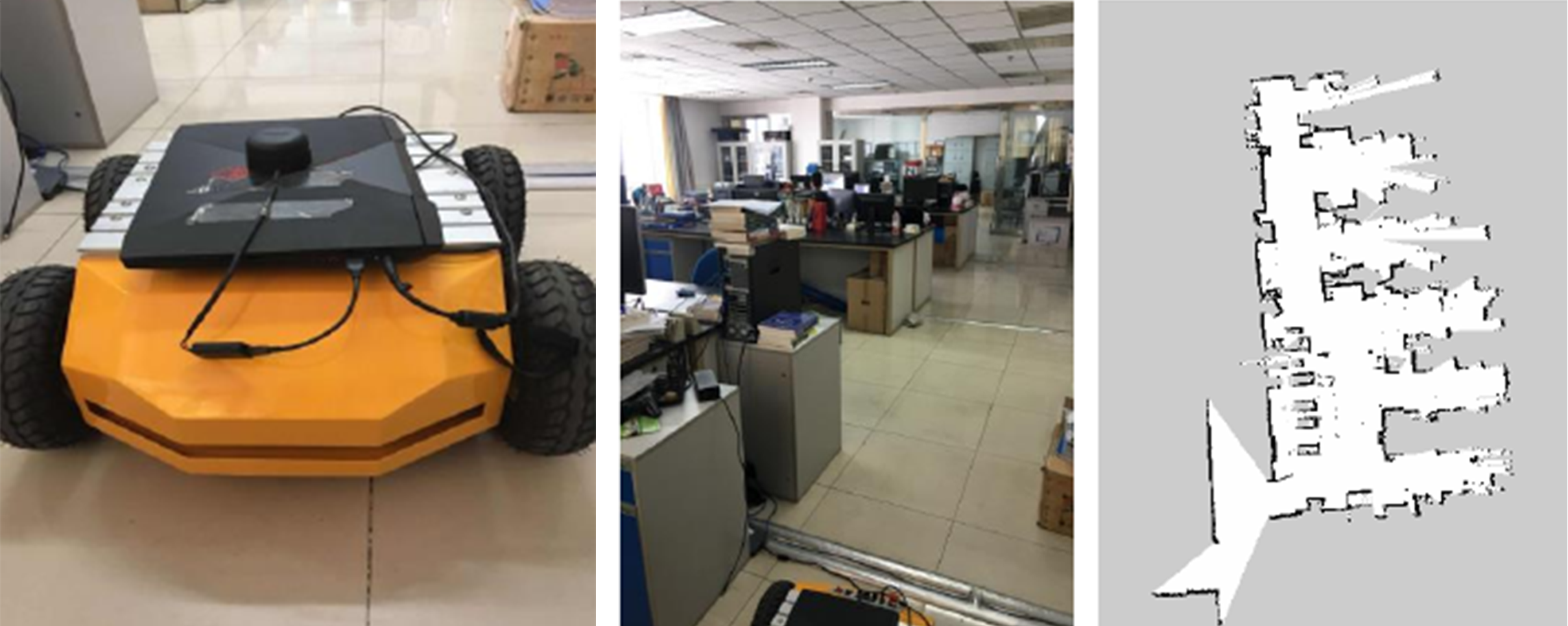
现已实现2D/3D SLAM导航,定位标签循迹,室外RTK循迹,路径规划,自动避障,远程遥控等功能。











精度介绍
| 注:产品描述仅供参考,若因产品升级或其他原因造成与实物存在差异时,请以实物为准 |
产品参数
| 尺寸 | 726*617*273mm |
|---|---|
| 净重 | 40kg |
| 负载 | 50kg |
| 电池 | 24v 磷酸铁锂电池 |
| 电池容量 | 20Ah |
| 续航时间 | 4h |
| 辅助电源 | 3*12V 1*5V |
| 最大速度 | 0.8m/s |
| 驱动方式 | 四驱 |
| 转向方式 | 差速转向 |
| 通信接口 | 串口 |
|---|---|
| 编码器精度 | 400线 |
| PID控制频率 | 50Hz |
| 适用地形 | 全地形 |
| 垂直越障能力 | 8cm |
| 爬坡能力 | 25° |
| 支持系统 | Windows/Linux |
| 支持平台 | X86 |
| 手柄控制 | 20m |
| 手柄通讯 | 2.4Ghz |
Autolabor PC
| CPU | AMD® Ryzen3 3200G |
|---|---|
| 芯片组 | AMD® A300 |
| 内存 | DDR4 8GB |
| 硬盘 | NVMe 250GB |
|---|---|
| Wi-Fi / 蓝牙 | 支持 |
电源组件
| 电池容量 | 16AH @ 24V |
|---|---|
| 输入/输出 | 24V x 10A / 12V x 20A |
| 输出口数量 | 5个(并联) |
|---|---|
| 纹波电压 | < 100mV |
显示器
| 尺寸 | 13.3 英寸 |
|---|---|
| 比例 | 16: 9 |
| 分辨率 | 1920*1080 |
| 亮度 | 300 cd/m² |
|---|---|
| 对比度 | 800: 1 |
| 触摸 | 否 |
激光雷达
| 测量距离 | 0.15-10 m @ 10% |
|---|---|
| 角度分辨率 | 0.36 ° |
| 扫描速度 | 15 Hz |
| 重复精度 | ±3 cm |
|---|---|
| 距离分辨率 | 1 cm |
深度相机
| 尺寸 | 103mmx33mmx22mm |
|---|---|
| 传感器 | ToF CCD+RGB |
| 激光发射器 | 940nm VCSEL |
| ToF分辨率帧率 | 640X480, Max.30fps |
| RGB分辨率帧率 | 1920X1080, 30fps |
| ToF FOV | 69°(H) × 51°(V) |
|---|---|
| RGB FOV | 73°(H) × 42°(V) |
| 输出格式 | RAW12(深度,IR), MJPEG(RGB) |
| 检测距离 | 0.35m~4.4m |
| 工作温度 | -10℃~50℃ |
产品参数
| 尺寸 | 726*617*273mm |
|---|---|
| 净重 | 40kg |
| 负载 | 50kg |
| 电池 | 24v 磷酸铁锂电池 |
| 电池容量 | 20Ah |
| 续航时间 | 4h |
| 辅助电源 | 3*12V 1*5V |
| 最大速度 | 0.8m/s |
| 驱动方式 | 四驱 |
| 转向方式 | 差速转向 |
| 通信接口 | 串口 |
|---|---|
| 编码器精度 | 400线 |
| PID控制频率 | 50Hz |
| 适用地形 | 全地形 |
| 垂直越障能力 | 8cm |
| 爬坡能力 | 25° |
| 支持系统 | Windows/Linux |
| 支持平台 | X86 |
| 手柄控制 | 20m |
| 手柄通讯 | 2.4Ghz |
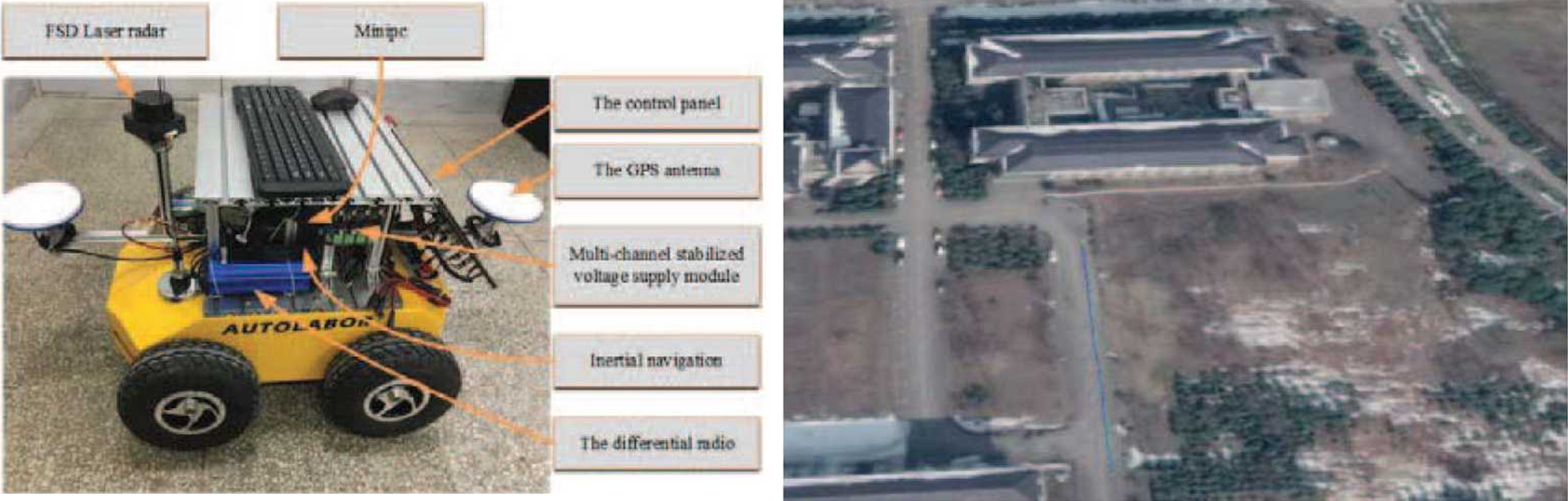
多线激光雷达(RS-lidar-16)
| 线束 | 16线 |
|---|---|
| 波长 | 905nm |
| 激光等级 | class1 |
| 精度 | ±2cm(典型值) |
| 测距 | 20cm-150m(目标反射率20%) |
| 出点数 | 320,000pts/s |
| 垂直视场角 | +15°~-15° |
|---|---|
| 垂直角分辨率 | 2.0° |
| 水平视场角 | 360° |
| 水平角分辨率 | 0.09°至0.36°(5-20Hz) |
| 转速 | 300-1200rmp(5-20Hz) |
| 采集数据 | 三维空间坐标、反射率 |
惯导(AH200C)
| 方位角 | 测量范围:±180°(陀螺与磁方位可选) 测量精度(RMS)@25℃:<1.5°(无磁干扰条件下) 分辨率:<0.1° |
|---|---|
| 倾角 | 测量范围:±500°/sec 测量精度(RMS)@25℃:<±0.5 °(动态)、<±0.2 °(静态) 分辨率:<0.1° |
| 陀螺仪 | 测量范围:±180°(陀螺与磁方位可选) 零点偏差稳定性@25℃:<200 °/hr 分辨率:<0.1°/sec 宽带:>100Hz |
| 加速度计 | 测量范围:±8G 分辨率:<10mg 宽带:>100Hz |
|---|---|
| 磁场计 | 测量范围:±8gauss 分辨率:<2.5mgauss 宽带:14-17Hz |
Autolabor PC
| CPU | AMD® Ryzen3 3200G |
|---|---|
| 芯片组 | AMD® A300 |
| 内存 | DDR4 8GB |
| 硬盘 | NVMe 250GB |
|---|---|
| Wi-Fi / 蓝牙 | 支持 |
电源组件
| 电池容量 | 16AH @ 24V |
|---|---|
| 输入/输出 | 24V x 10A / 12V x 20A |
| 输出口数量 | 5个(并联) |
|---|---|
| 纹波电压 | < 100mV |
显示器
| 尺寸 | 13.3 英寸 |
|---|---|
| 比例 | 16: 9 |
| 分辨率 | 1920*1080 |
| 亮度 | 300 cd/m² |
|---|---|
| 对比度 | 800: 1 |
| 触摸 | 否 |
激光雷达
| 测量距离 | 0.15-10 m @ 10% |
|---|---|
| 角度分辨率 | 0.36 ° |
| 扫描速度 | 15 Hz |
| 重复精度 | ±3 cm |
|---|---|
| 距离分辨率 | 1 cm |
深度相机
| 尺寸 | 103mmx33mmx22mm |
|---|---|
| 传感器 | ToF CCD+RGB |
| 激光发射器 | 940nm VCSEL |
| ToF分辨率帧率 | 640X480, Max.30fps |
| RGB分辨率帧率 | 1920X1080, 30fps |
| ToF FOV | 69°(H) × 51°(V) |
|---|---|
| RGB FOV | 73°(H) × 42°(V) |
| 输出格式 | RAW12(深度,IR), MJPEG(RGB) |
| 检测距离 | 0.35m~4.4m |
| 工作温度 | -10℃~50℃ |
产品参数
| 尺寸 | 726*617*273mm |
|---|---|
| 净重 | 40kg |
| 负载 | 50kg |
| 电池 | 24v 磷酸铁锂电池 |
| 电池容量 | 20Ah |
| 续航时间 | 4h |
| 辅助电源 | 3*12V 1*5V |
| 最大速度 | 0.8m/s |
| 驱动方式 | 四驱 |
| 转向方式 | 差速转向 |
| 通信接口 | 串口 |
|---|---|
| 编码器精度 | 400线 |
| PID控制频率 | 50Hz |
| 适用地形 | 全地形 |
| 垂直越障能力 | 8cm |
| 爬坡能力 | 25° |
| 支持系统 | Windows/Linux |
| 支持平台 | X86 |
| 手柄控制 | 20m |
| 手柄通讯 | 2.4Ghz |
定位系统
| 标签距离 | 30m (理想情况下测试结果) <20m (常规建图定位建议距离) |
|---|---|
| 定位精度 | 绝对精度:距离的1~3% 差分精度:±2cm |
| 定位频率 | 1/20Hz ~ 45Hz 与移动标签到固定标签的距离有关(距离越近频率越高) 与移动标签的数量有关(数量越多频率越低) |
| 供电 | 内部:1000mAh 锂电池(根据使用情况可续航2天到数月) 外部:USB供电 |
|---|---|
| 尺寸 | 55 x 55 x 33 mm (含天线:55 x 55 x 65 mm) |
Autolabor PC
| CPU | AMD® Ryzen3 3200G |
|---|---|
| 芯片组 | AMD® A300 |
| 内存 | DDR4 8GB |
| 硬盘 | NVMe 250GB |
|---|---|
| Wi-Fi / 蓝牙 | 支持 |
电源组件
| 电池容量 | 16AH @ 24V |
|---|---|
| 输入/输出 | 24V x 10A / 12V x 20A |
| 输出口数量 | 5个(并联) |
|---|---|
| 纹波电压 | < 100mV |
显示器
| 尺寸 | 13.3 英寸 |
|---|---|
| 比例 | 16: 9 |
| 分辨率 | 1920*1080 |
| 亮度 | 300 cd/m² |
|---|---|
| 对比度 | 800: 1 |
| 触摸 | 否 |
激光雷达
| 测量距离 | 0.15-10 m @ 10% |
|---|---|
| 角度分辨率 | 0.36 ° |
| 扫描速度 | 15 Hz |
| 重复精度 | ±3 cm |
|---|---|
| 距离分辨率 | 1 cm |
深度相机
| 尺寸 | 103mmx33mmx22mm |
|---|---|
| 传感器 | ToF CCD+RGB |
| 激光发射器 | 940nm VCSEL |
| ToF分辨率帧率 | 640X480, Max.30fps |
| RGB分辨率帧率 | 1920X1080, 30fps |
| ToF FOV | 69°(H) × 51°(V) |
|---|---|
| RGB FOV | 73°(H) × 42°(V) |
| 输出格式 | RAW12(深度,IR), MJPEG(RGB) |
| 检测距离 | 0.35m~4.4m |
| 工作温度 | -10℃~50℃ |
产品参数
| 尺寸 | 726*617*273mm |
|---|---|
| 净重 | 40kg |
| 负载 | 50kg |
| 电池 | 24v 磷酸铁锂电池 |
| 电池容量 | 20Ah |
| 续航时间 | 4h |
| 辅助电源 | 3*12V 1*5V |
| 最大速度 | 0.8m/s |
| 驱动方式 | 四驱 |
| 转向方式 | 差速转向 |
| 通信接口 | 串口 |
|---|---|
| 编码器精度 | 400线 |
| PID控制频率 | 50Hz |
| 适用地形 | 全地形 |
| 垂直越障能力 | 8cm |
| 爬坡能力 | 25° |
| 支持系统 | Windows/Linux |
| 支持平台 | X86 |
| 手柄控制 | 20m |
| 手柄通讯 | 2.4Ghz |
RTK580
| 通道 | 432个 |
|---|---|
| 频点 | 5星多频 BDS、GPS、QZSS、GLONASS、Galileo |
| 单点定位 | 平面:1.5m |
| 高程:2.5m | |
| 差分定位(RTK) | 平面:1cm+1ppm |
| 高程:1.5cm+1ppm | |
| 定位精度 | 0.2度/1m基线 |
| 速度精度 | 0.03m/s |
| 时间精度 | 20ns |
| 尺寸 | 93mm*69mm*37mm |
| 重量 | 153g |
| 冷启动时间 | <25秒 |
|---|---|
| 初始化可靠性 | >99.9% |
| 数据更新率 | 20Hz |
| 差分通讯方式 | 免DTU模块 |
| RTK初始化时间 | >5秒 |
| 差分数据 | RTCM 3.0/3.2/3.3 |
| 数据格式 | NEMA-0183、Unicorn |
| 双天线接口 | SMA公头外螺内孔 * 2 |
| 通讯接口 | USB-Type-C * 3 |
| 供电接口 | USB-Type-C/XT-30 |
| 供电电压 | 5-15V |
| 功耗 | 2.4W |
Autolabor PC
| CPU | AMD® Ryzen3 3200G |
|---|---|
| 芯片组 | AMD® A300 |
| 内存 | DDR4 8GB |
| 硬盘 | NVMe 250GB |
|---|---|
| Wi-Fi / 蓝牙 | 支持 |
电源组件
| 电池容量 | 16AH @ 24V |
|---|---|
| 输入/输出 | 24V x 10A / 12V x 20A |
| 输出口数量 | 5个(并联) |
|---|---|
| 纹波电压 | < 100mV |
显示器
| 尺寸 | 13.3 英寸 |
|---|---|
| 比例 | 16: 9 |
| 分辨率 | 1920*1080 |
| 亮度 | 300 cd/m² |
|---|---|
| 对比度 | 800: 1 |
| 触摸 | 否 |
激光雷达
| 测量距离 | 0.15-10 m @ 10% |
|---|---|
| 角度分辨率 | 0.36 ° |
| 扫描速度 | 15 Hz |
| 重复精度 | ±3 cm |
|---|---|
| 距离分辨率 | 1 cm |
深度相机
| 尺寸 | 103mmx33mmx22mm |
|---|---|
| 传感器 | ToF CCD+RGB |
| 激光发射器 | 940nm VCSEL |
| ToF分辨率帧率 | 640X480, Max.30fps |
| RGB分辨率帧率 | 1920X1080, 30fps |
| ToF FOV | 69°(H) × 51°(V) |
|---|---|
| RGB FOV | 73°(H) × 42°(V) |
| 输出格式 | RAW12(深度,IR), MJPEG(RGB) |
| 检测距离 | 0.35m~4.4m |
| 工作温度 | -10℃~50℃ |
产品参数
| 尺寸 | 726*617*273mm |
|---|---|
| 净重 | 40kg |
| 负载 | 50kg |
| 电池 | 24v 磷酸铁锂电池 |
| 电池容量 | 20Ah |
| 续航时间 | 4h |
| 辅助电源 | 3*12V 1*5V |
| 最大速度 | 0.8m/s |
| 驱动方式 | 四驱 |
| 转向方式 | 差速转向 |
| 通信接口 | 串口 |
|---|---|
| 编码器精度 | 400线 |
| PID控制频率 | 50Hz |
| 适用地形 | 全地形 |
| 垂直越障能力 | 8cm |
| 爬坡能力 | 25° |
| 支持系统 | Windows/Linux |
| 支持平台 | X86 |
| 手柄控制 | 20m |
| 手柄通讯 | 2.4Ghz |
无人驾驶 - 中国智能汽车大赛(CIVC 2017)

自动驾驶 - 多车协同控制研究 – 清华大学
机器人地空协同控制研究– 深圳大学

基于脑机接口的脑控车辆研究 – 东南大学

果园机器人自主避障策略研究 – 河南科技大学

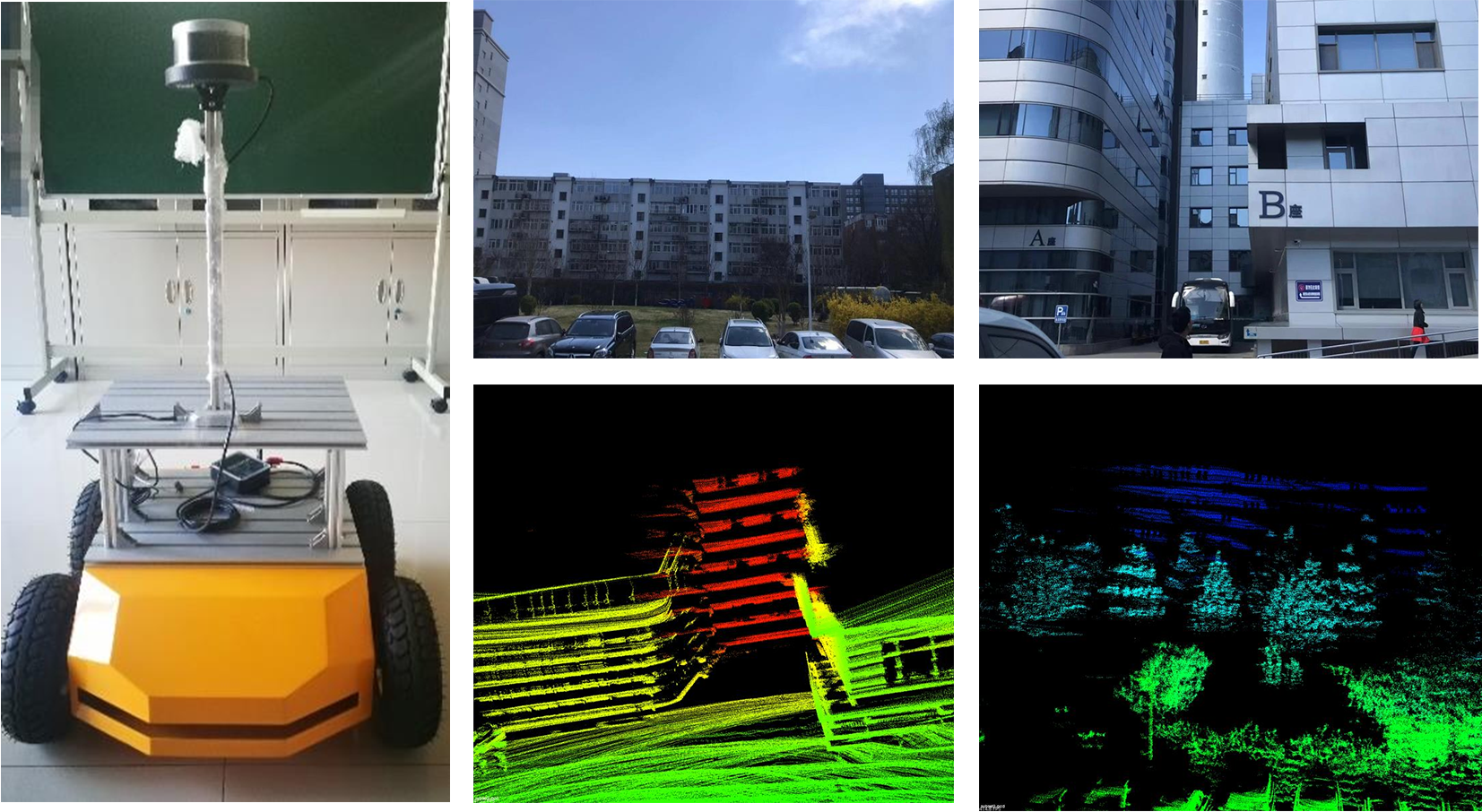
基于图优化的轮式机器人三维建图研究 - 中国科学院国家空间科学中心
目标跟踪 – 湖南大学

基于四轮差速轮式机器人的路径追踪算法研究 – 东北大学
基于强化学习的机器人全局路径规划算法研究 - 西湖大学
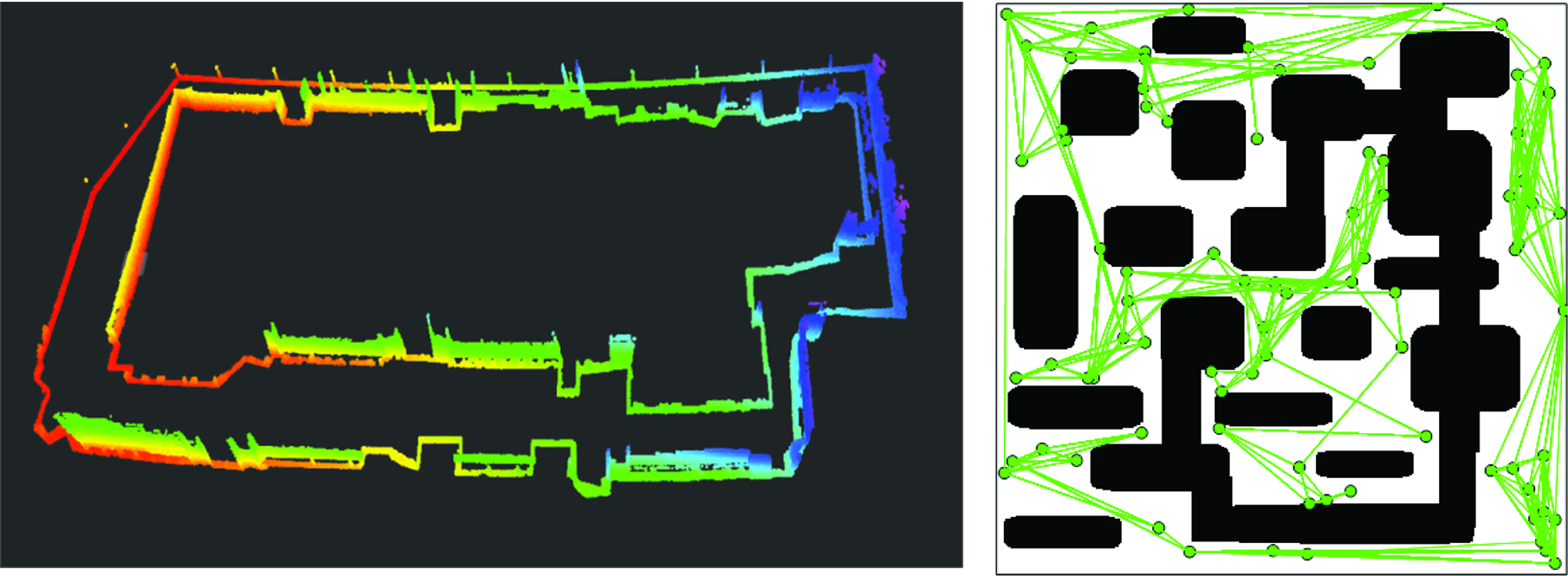
基于SLAM的轮式机器人定位与导航技术研究 - 中国科学院国家空间科学中心
基于Autolabor机器人研究发表的论文
中文:[1]郑国财. 智能网联汽车背景下中职汽车教师专业能力的研究[D].天津职业技术师范大学,2020.
[2]王召新,刘华平,续欣莹,孙富春.无人平台复杂地形探测的视触融合方法[J].飞控与探测,2020,3(02):52-58.
[3]章弘凯,陈年生,范光宇.基于粒子滤波的智能机器人定位算法[J].计算机应用与软件,2020,37(02):134-140+199.
[4]陈忱. 无人驾驶系统中智能算法及其安全性研究[D].南京邮电大学,2019.
[5]白中浩,朱磊,李智强.基于多模型融合和重新检测的高精度鲁棒目标跟踪[J].仪器仪表学报,2019,40(09):132-141.
[6] 张耀威;基于三维目标检测的轮式机器人避障导航技术研究[D];中国科学院大学(中国科学院国家空间科学中心);2019年
[7]付光耀. 基于图优化的轮式机器人三维建图研究[D].中国科学院大学(中国科学院国家空间科学中心),2019.
[8]张德明. 运动想象脑电辨识方法研究及脑控车辆BCI系统构建[D].东南大学,2019.
[9]张居正. 基于深度学习的端到端车道线检测方法[D].湖南大学,2019.
[10]王小华,郑腾,孙伟,苗中华.基于ROS平台的智能车运动线控系统设计及实现[J].测控技术,2019,38(04):22-25.
[11]段云志. 基于One-Shot Learning的场景识别技术的设计与实现[D].电子科技大学,2019.
[12]张家瑞. 基于障碍物分类识别的林下作业机器人自主避障策略研究[D].河南科技大学,2019.
[13]郑文钢. 基于RGB-D的移动搬运机器人的物体位置检测与姿态估计[D].浙江大学,2019.
[14]贺强,陈一军,蒋涛,贺振世,陈俊茹,韩怡,刘琳琳.搬运机器人在印刷装备智能制造中的应用[J].今日印刷,2018(07):52-54.
[15]熊安. 基于SLAM的轮式机器人定位与导航技术研究[D].中国科学院大学(中国科学院国家空间科学中心),2018.
[16]李辉. 基于激光雷达的2D-SLAM的研究[D].浙江工业大学,2017.
英文:[1] Wang, Yuning, et al. "A Cooperative Motion Control Strategy of Multi-objects Simulation Based on CAV Testing Platform." Green, Smart and Connected Transportation Systems. Springer, Singapore, 2020. 1197-1209.
[2] P. Gao, Z. Liu, Z. Wu and D. Wang, "A Global Path Planning Algorithm for Robots Using Reinforcement Learning," 2019 IEEE International Conference on Robotics and Biomimetics(ROBIO),Dali,China,2019,pp.1693-1698,doi:10.1109/ROBIO49542.2019.8961753.
[3] Yan, YongJun, et al. "A New Path Tracking Algorithm for Four-Wheel Differential Steering Vehicle." 2019 Chinese Control And Decision Conference (CCDC). IEEE, 2019. [4] Chen, Jie, et al. "A GAN-based Active Terrain Mapping for Collaborative Air-Ground Robotic System." 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM). IEEE, 2019.
以上内容素材源于公开发表的论文,如作者有异议可联系删除。