








| 注:产品描述仅供参考,若因产品升级或其他原因造成与实物存在差异时,请以实物为准 |
产品参数
| 尺寸 | 726*617*326mm |
|---|---|
| 净重 | 40kg |
| 负载 | 50kg |
| 电池 | 24v 磷酸铁锂电池 |
| 电池容量 | 20AH |
| 续航时间 | 4h |
| 辅助电源 | 24v |
| 最大速度 | 0.8m/s |
| 驱动方式 | 四驱 |
| 转向方式 | 差速转向 |
| 通信接口 | RS232串口 115200bps |
| 编码器精度 | 物理:400线 |
|---|---|
| 逻辑:1600线(四倍频) | |
| PID控制频率 | 50Hz |
| 适用地形 | 全地形 |
| 垂直越障能力 | 8cm |
| 爬坡能力 | 25° |
| 支持系统 | Windows/Linux |
| 支持平台 | x86/arm |
| 手柄控制 | 20m |
| 手柄通讯 | 2.4Ghz |
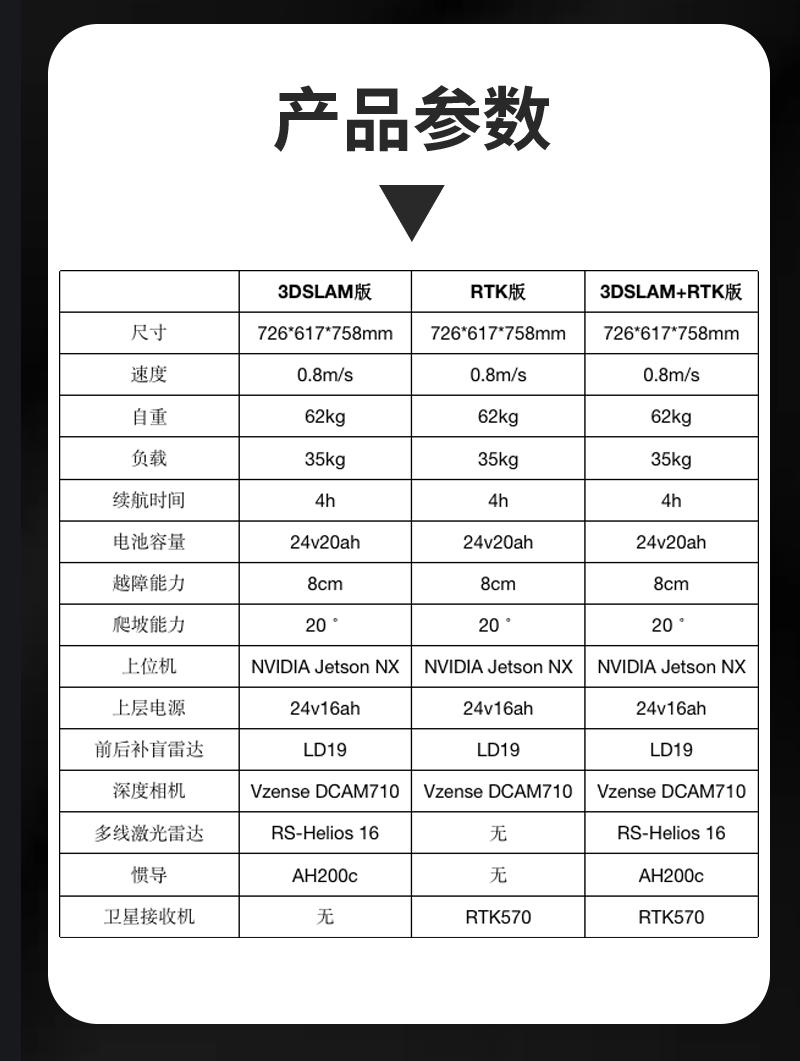
产品参数
| 尺寸 | 726*617*758mm |
|---|---|
| 速度 | 0.8m/s |
| 自重 | 62kg |
| 负载 | 35kg |
| 续航时间 | 4h |
| 电池容量 | 24v20ah |
| 越障能力 | 8cm |
| 爬坡能力 | 20° |
| 上位机 | NVIDIA Jetson NX |
|---|---|
| 上层电源 | 24v16ah |
| 前后补盲雷达 | LD19 |
| 深度相机 | Vzense DCAM710 |
| 多线激光雷达 | RS-Helios 16 |
| 惯导 | AH200c |
产品参数
| 尺寸 | 726*617*758mm |
|---|---|
| 速度 | 0.8m/s |
| 自重 | 62kg |
| 负载 | 35kg |
| 续航时间 | 4h |
| 电池容量 | 24v20ah |
| 越障能力 | 8cm |
| 爬坡能力 | 20° |
| 上位机 | NVIDIA Jetson NX |
|---|---|
| 上层电源 | 24v16ah |
| 前后补盲雷达 | LD19 |
| 深度相机 | Vzense DCAM710 |
| 卫星接收机 | RTK580 |
产品参数
| 尺寸 | 726*617*758mm |
|---|---|
| 速度 | 0.8m/s |
| 自重 | 62kg |
| 负载 | 35kg |
| 续航时间 | 4h |
| 电池容量 | 24v20ah |
| 越障能力 | 8cm |
| 爬坡能力 | 20° |
| 上位机 | NVIDIA Jetson NX |
|---|---|
| 上层电源 | 24v16ah |
| 前后补盲雷达 | LD19 |
| 深度相机 | Vzense DCAM710 |
| 多线激光雷达 | RS-Helios 16 |
| 惯导 | AH200c |
| 卫星接收机 | RTK580 |